STM32 Timer + ADC + DMA: Part 3
In this final article of three, we’re going to make our DMA-based ADC example from the second article run off a timer, and we’ll do a small demonstration of how this might be used in a realistic application.
There’s a video demonstrating each of the examples covered in this series of articles. It’s probably most useful to watch it in conjunction with reading the articles.
Timers on the STM32F767
The STM32F767 has a lot of timers. They come in five different varieties:
“Advanced-control” timers (TIM1, TIM8);
32-bit general-purpose timers with 4 channels (TIM2, TIM5);
16-bit general-purpose timers with 4 channels (TIM3, TIM4);
16-bit up-counter timers with 2 channels (TIM9, TIM12);
16-bit up-counter timers with 1 channel (TIM10, TIM11, TIM13, TIM14);
16-bit basic timers (TIM6, TIM7).
The different timer types have different features (different PWM
modes, for instance). For our purposes, the most important feature is
the ability to trigger other peripherals, in particular, the ADC. The
timer outputs that can be used to trigger ADC conversion are listed in
the EXTSEL external event select field of the ADC’s CR2
configuration register:
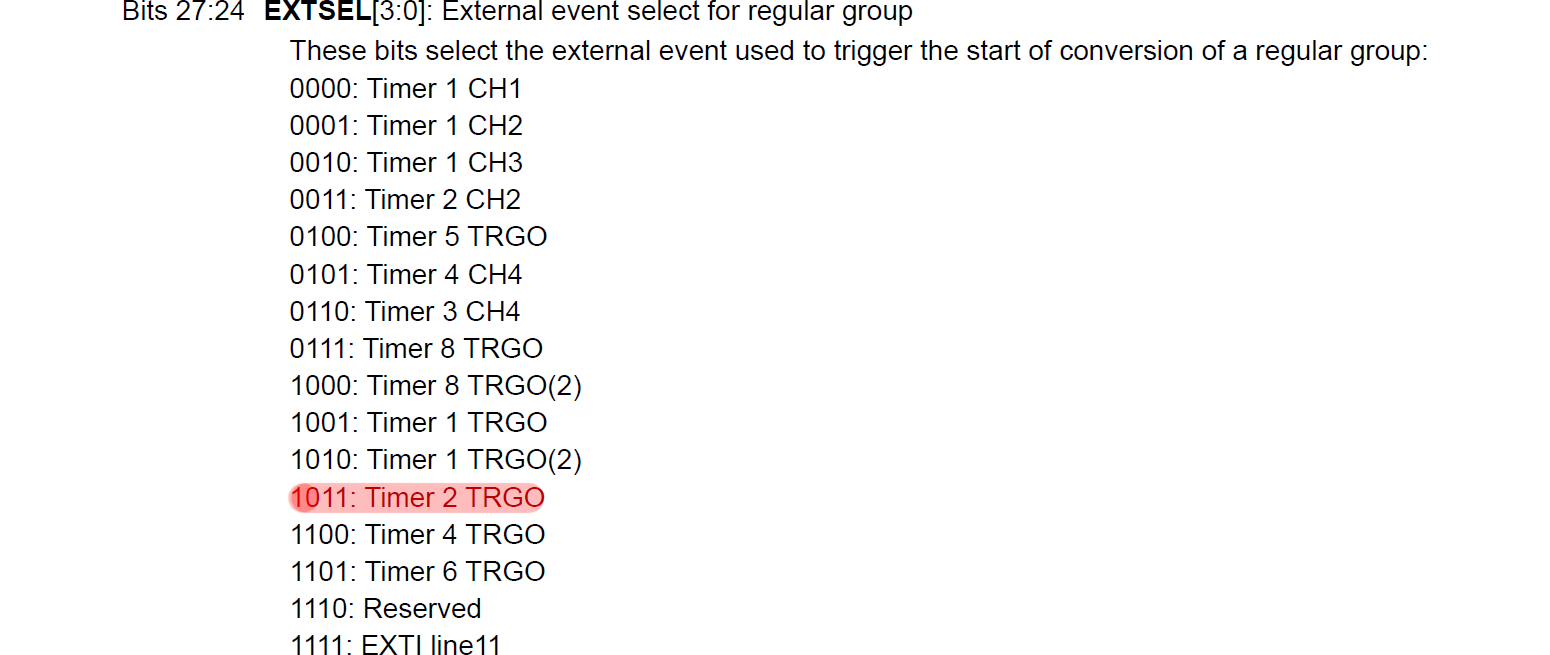
Here, “TRGO” means the trigger output from the timers, which
can be set up to be activated on a number of different timer-related
events. In conjunction with the possible settings in the EXTEN
field of CR2, this allows us to cause ADC conversions to be
triggered on different edge transitions for any of these trigger
inputs:

We’re going to use timer TIM2 for our examples. This is a
32-bit general-purpose timer that supports various counter modes, as
well as having features for PWM waveform generation and timer capture.
We’re going to use the timer in its simple up-counter mode, generating
a trigger pulse on the TRGO trigger output when timer counter
overflows and reloads. This will generate a regular trigger pulse that
we can connect to the ADC trigger input.
(The STM32 microcontrollers tend to use ad hoc mechanisms for inter-peripheral connections like this. In this case, we have a specialised set of configuration assignments we can do for the ADC peripheral to make it trigger on a signal from a selected timer. Some other ARM microcontrollers have a more systematic way of dealing with these kinds of peripheral interconnections. For example, the Nordic Semiconductor nRF52840 has a whole events and tasks infrastructure for each peripheral, along with a dedicated programmable peripheral interconnect system to wire events in one peripheral to tasks in another peripheral. You can wire up a timer event to the “sample” task of the ADC to do regular sampling. But using this setup, you could also do a whole range of completely different things.)
Example 4: timer-triggered ADC conversions
In
example
ex4.c, we’re going to sample data from the ADC at 1 Hz,
collecting 4 channels of ADC data into a buffer using DMA.
DMA configuration
DMA configuration is completely identical to the previous example. We use the same DMA modes, we’re moving 4 half-word data items from a peripheral to memory, and so on. And we use the DMA transfer complete interrupt to detect when the ADC conversions are complete.
ADC configuration
The ADC configuration for this example differs from the previous example in only one way, and that’s the way that ADC conversions are started. Everything else is the same: the number and order of channels to be converted, channel sample times, and so on.
For the previous example, we set the EXTEN field of ADC
register CR2 to zero, which disabled external triggers for the
ADC. That meant that we started ADC conversions manually by setting
the SWSTART bit in the CR2 register. This time, we set
the EXTEN and EXTSEL fields of the CR2 register
to start ADC conversions on the rising edge of timer TIM2’s
TRGO trigger output:
MODIFY_REG(ADC1->CR2, ADC_CR2_EXTSEL, 0x0B << ADC_CR2_EXTSEL_Pos);
MODIFY_REG(ADC1->CR2, ADC_CR2_EXTEN, 0x01 << ADC_CR2_EXTEN_Pos);Here, the 0x0B value for EXTSEL selects TIM2 TRGO
as an external event, and the 0x01 value for EXTEN
triggers ADC conversion on the rising edge of the trigger input.
Timer configuration
Configuring timer TIM2 to generate a trigger output pulse once
every second requires a few steps. All timers run off a clock, and
essentially just count clock pulses. So the first thing we need to
know is how fast those clock pulses occur for the timer we’re using.
In its up-count mode, the TIM2 timer we’re going to use can be
thought of as a simple counter clocked off the timer’s input clock
divided by a prescaler value. We can set the prescaler (so controlling
how fast the counter counts up) and the reload value (controlling how
often the counter overflows and a trigger event occurs).
1. Determine timer input clock frequency
Timer TIM2 is on the APB1 peripheral clock, so the clock input
can be determined by looking at the APB1 prescaler value in the
PPRE1 field of the RCC->CFGR register:
uint32_t apb1_prescaler = READ_BIT(RCC->CFGR, RCC_CFGR_PPRE1);
uint32_t timer_clock_frequency =
SystemCoreClock >> APBPrescTable[apb1_prescaler >> RCC_CFGR_PPRE1_Pos];
if (apb1_prescaler != RCC_CFGR_PPRE1_DIV1) {
timer_clock_frequency *= 2;
}Here, SystemCoreClock is the main system clock frequency
maintained by the CMSIS board-support code, and APBPrescTable
is a table of APB prescaler factors that the PPRE1 field in
RCC->CFGR encodes. (There is a small wrinkle here, in that the
timer input clock frequency has an extra factor of 2 if the prescaler
factor is not unity. This is shown in the main clock tree for the
processor in Figure 13 in the reference manual.)
For our case, with SystemCoreClock running at the maximum 216
MHz rate, the timer input clock frequency is 27 MHz (the APB1
prescaler is set to
divide
the system clock by 8 in the common setup code).
2. Determine time base prescaler and reload value
The timer prescaler register TIM2->PSC determines the
relationship between the timer input clock (27 MHz) and the update
rate of the timer’s counter.
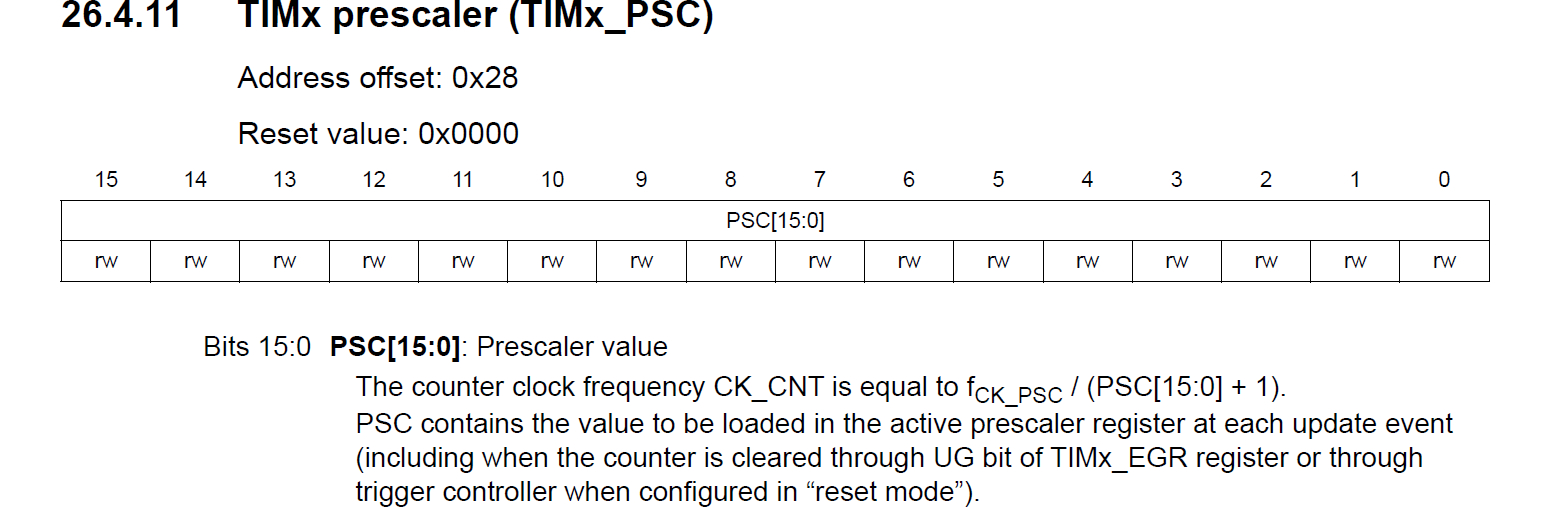
Even though TIM2 is a 32-bit timer, the prescaler is 16 bits
wide. This means we can have update frequencies ranging over:
PSC = 0givingCK_CNT= 27 MHz / 1 = 27 MHz;PSC = 0xFFFFgivingCK_CNT= 27 MHz / 65536 = 411.987 Hz.
All other things being equal, it can be a good idea to choose the smallest possible prescaler value that you can. This gives a timer counter that updates as fast as possible, giving the finest possible time resolution to the timer. Whether or not this is actually the best thing to do depends on exactly which timer you’re using.
In our case we’re using a 32-bit timer. That means that if we use a prescaler of one, then the timer counter updates at 27 MHz, and the longest interval that we can time is 232 / 27,000,000 = 159 seconds. That’s probably enough for most applications. However, if you were using a 16-bit timer, the longest interval would only be 216 / 27,000,000 = 2.4 ms, which is less useful! If you’re using a 16-bit counter, you’d almost certainly want to use a larger prescaler value to slow down the clock driving the timer’s counter, allowing you to measure longer intervals.
Let’s choose a prescaler value to make calculations simple, by having the timer counter update at 1 MHz. This is 1/27 of the timer input clock frequency, so we need to set:
uint32_t timer_prescaler = 27;which we’ll use to set the TIM2->PSC prescaler register.
We then need to work out the timer reload value we need to get trigger
events at the required frequency. The timer counts up from zero to the
value in the ARR reload register, then resets to zero. When the
timer reloads its counter to zero, it generates an update event, which
is what we use to pulse the TRGO trigger output.
The reload value is calculated as:
uint32_t timer_reload =
timer_clock_frequency / (timer_prescaler * TIMER_FREQUENCY);Here, TIMER_FREQUENCY (1 Hz) is the desired timer update
frequency. You can see that this makes sense by thinking about the
calculation for a couple of indicative frequencies.
For a frequency of 1 Hz, with a 27 MHz input clock and a prescaler
value of 27, we have that timer_reload = 1,000,000, i.e. we
count up 1,000,000 pulses of the 1 MHz prescaled clock to give a total
period between timer reloads of 1 second.
For a frequency of 100 Hz, again with a 27 MHz input clock and a
prescaler value of 27, we have that timer_reload = 10,000, and
we can count up to 10,000 one hunder times in the one second that it
takes the 1 MHz prescaled input clock to count up to one million, i.e.
we generate reload events 100 times per second.
3. Configure timer
As for other STM32 peripherals, the peripheral clock for the timer
must be enabled, by setting the TIM2EN bit in the
RCC->APB1ENR register.
The main part of the timer configuration consists of writing the appropriate values into the prescaler and reload value registers:
WRITE_REG(TIM2->PSC, timer_prescaler - 1);
WRITE_REG(TIM2->ARR, timer_reload - 1);setting the timer mode (simple up-counter):
MODIFY_REG(TIM2->CR1, (TIM_CR1_DIR | TIM_CR1_CMS), 0);and enabling the TRGO trigger output on update (i.e. counter reload) events:
MODIFY_REG(TIM2->CR2, TIM_CR2_MMS, 0x2 << TIM_CR2_MMS_Pos);In the ex4.c code, we also enable timer interrupts for
debugging purposes, but it’s not normally necessary to observe these
interrupts: the trigger output from the timer starts the ADC
conversion without any interrupts needing to be generated or serviced.
4. Enable timer
Once the timer is configured, it needs to be enabled by setting the
CEN bit in the timer’s CR1 configuration register:
SET_BIT(TIM2->CR1, TIM_CR1_CEN);One feature of the counters on the STM32 devices that requires some care is that register settings for things like prescaler and reload values are loaded into “shadow registers”, and only become active on a timer update event (essentially a roll-over when the reload value is reached by the timer’s counter). This prevents timer glitches when prescaler and reload values are modified while the timer is running.
When the timer is not running, reloads of the new configuration
values need to be forced by manually generating a timer update event.
This is done by writing to the timer’s EGR event generation
register:
SET_BIT(TIM2->EGR, TIM_EGR_UG);This generates a timer update, and the timer starts running at the configured rate, generating trigger events each time the timer’s counter reaches the reload value.
Main program
As for the other examples, the main program for ex4.c is very
simple: just a super-loop that examines some global flags set by
interrupt service routines to detect DMA completion and timer events
(for debugging). When a DMA transfer completes, the ADC conversion
results are retrieved and sent out over the USART.
When this example is flashed to the Nucleo-144 board, ADC conversion results are written to the ST-Link’s virtual serial port once per second. This is the result that we wanted to achieve!
Here’s a quick recap of what’s happening here:
The
TIM2timer is running off the 27 MHz APB1 timer clock, using a prescaler of 27, so that the timer count register is updating at 1 MHz.When the
TIM2counter register values reaches 1,000,000 (the value in theARRreload register), the timer counter is reset to zero.When the
TIM2timer resets its counter to zero, it generates a trigger pulse on its TRGO output. These trigger pulses occur at a frequency of 1 Hz.The
TIM2TRGO output is connected to the external trigger input of ADCADC1. When a trigger pulse is generated by timerTIM2, the ADC starts its regular channel conversion sequence.The contents of the
ADC1->SQRxregisters cause the ADC to convert four analog inputs one after another in scan mode.The ADC is enabled for DMA transfers: after each ADC conversion is complete, a DMA transfer is initiated on stream 0 on
DMA2.The
DMA2DMA controller transfers the latest ADC conversion result to the memory buffer configured in the DMA setup.After four ADC conversions, the DMA controller raises a “transfer complete” interrupt to indicate that it has performed all four transfers for which it was configured.
In the ISR for the the DMA’s “transfer complete” interrupt, we set a flag that is observed in the main program loop and is used to process the ADC samples collected into our buffer.
Apart from the final processing of the buffered results in response to the DMA interrupt, all of this happens without any action from the main processor core.
Example 5: wannabe USB oscilloscope
So we can do the thing we wanted to do, but it’s a bit of an anticlimax. We’re collecting data on a regular timer, but we’re not doing much with it. That seems boring, so I decided to knock together a (completely useless) USB oscilloscope demonstration. This comes in two parts:
STM32 data capture program
The STM32 data-capture part of the code is in
ex5.c.
This is identical to ex4.c, except that the data is written to
the USART as binary values (instead of being formatted to ASCII
strings) and the sample rate is higher (500 Hz).
Python mini-oscilloscope application
The display side of the code, which runs on a PC, is written in
Python, and is
ex5-view.py.
This uses the pyserial library to read data from the USB
virtual serial port, and the pygame library to do very simple
data plotting and display.
This can’t be considered anything more than a very little demonstration, but it does work, it shows how easy it is to make these kinds of small and simple data display applications.
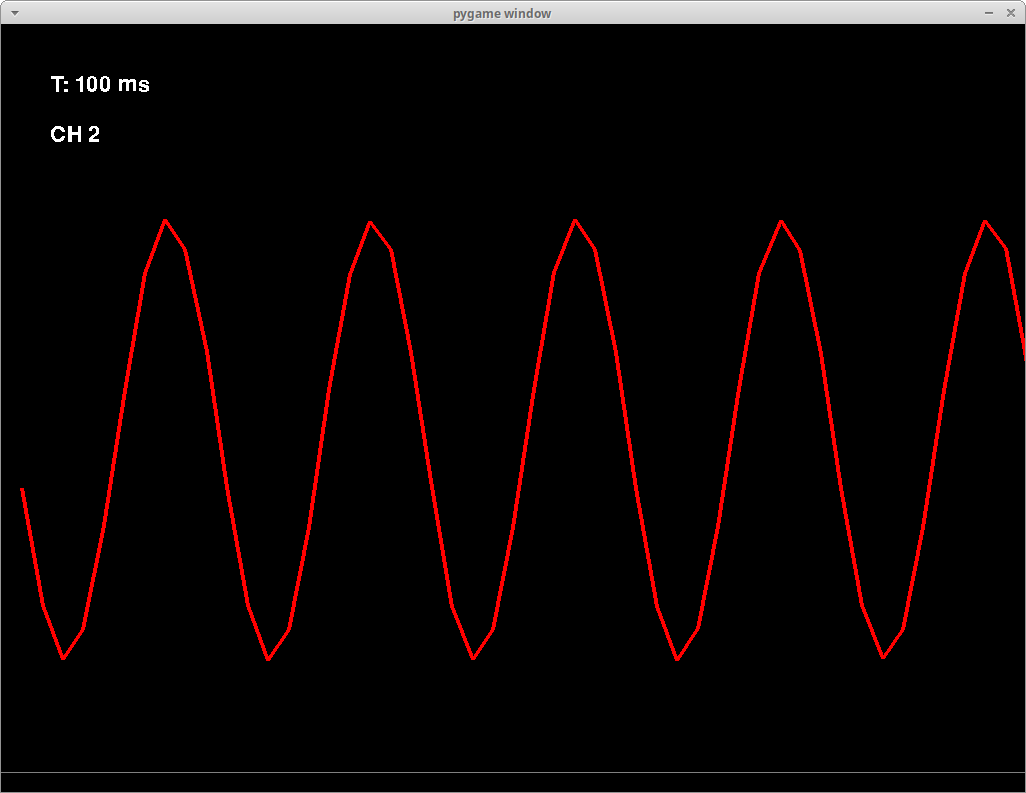
Experimental setup and screenshots
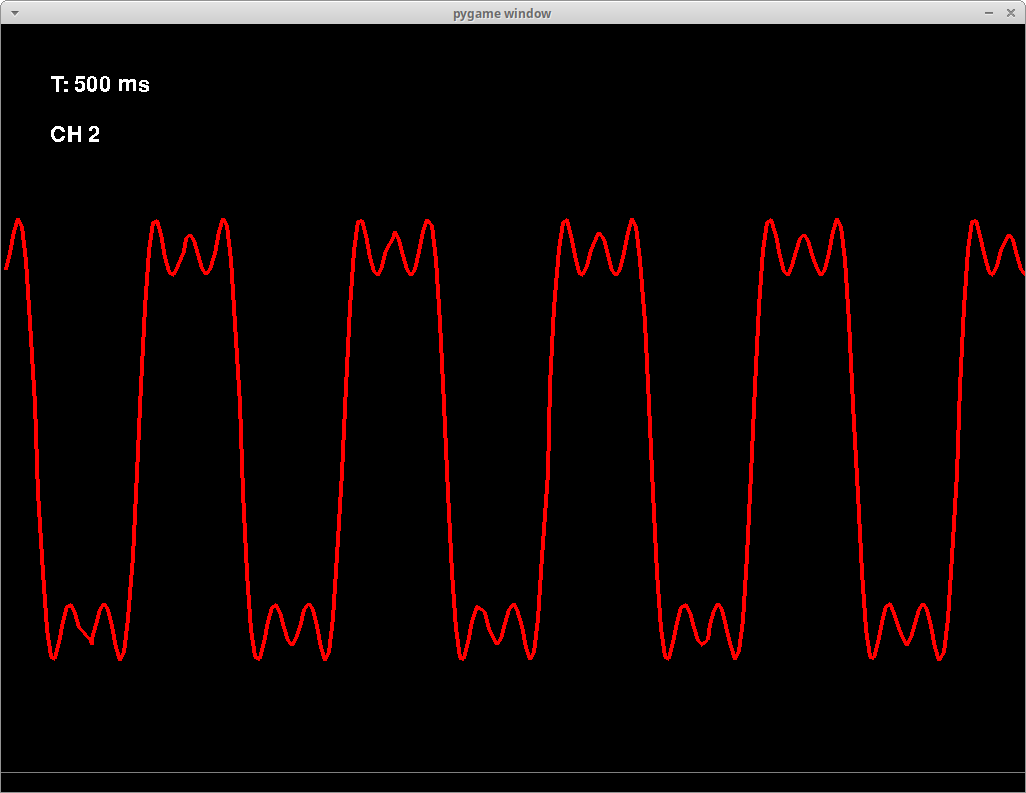
Here, I set up an Analog Discovery 2 as a waveform generator, connected its output channel to the first ADC input I’m using, and used the Python code to display the captured waveforms.
Here’s a 50 Hz sinewave:
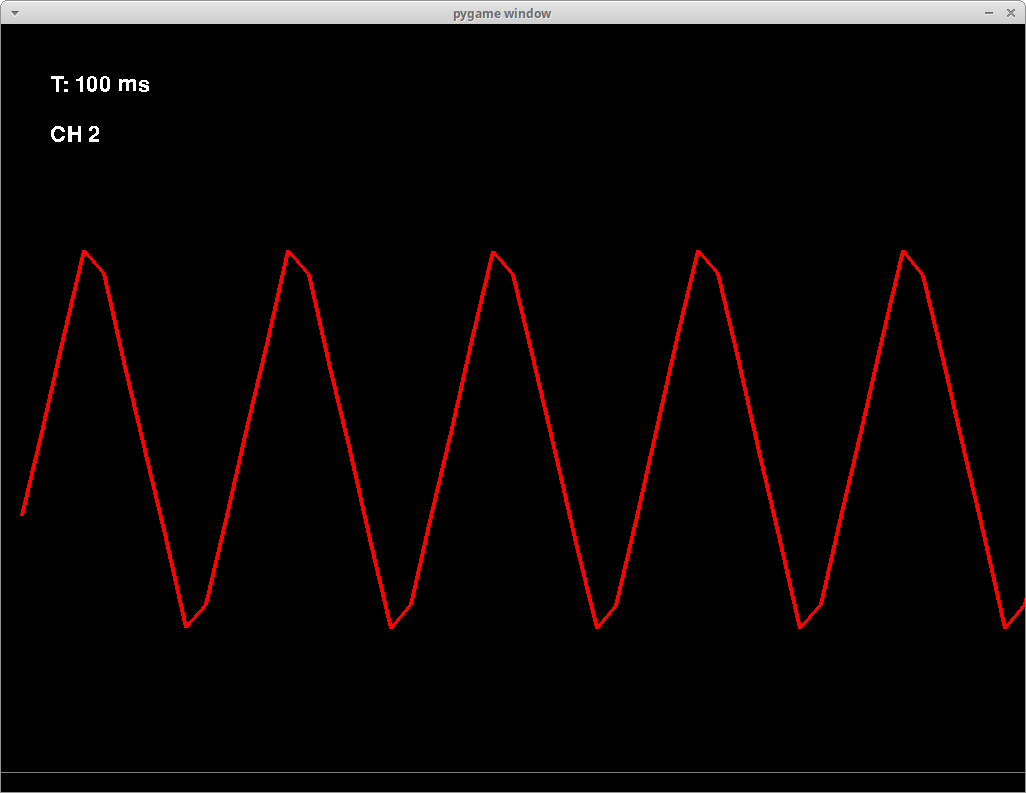
Here’s a triangle wave:
Here’s a more complex composite waveform:
Conclusions
You could definitely set all this up more quickly using the tools in the STM32Cube IDE and using the STM32 HAL hardware abstraction layer libraries, but I bet you wouldn’t end up understanding as much about how peripherals work together in STM32F7 MCUs!
Learning this stuff is unfortunately quite a bit of work, as you have to spend a lot of time reading the processor reference manual and wading through descriptions of lots of registers and lots of modes of operation of the peripherals. But I do think it’s worthwhile going through things this way at least once for a few different setups on your MCU before you dive into using the HAL.